Valtra pilotti: Robotiikka helpottaa työn kuomittavuutta ja nopeuttaa työvaiheita
Valtra halusi robotisoida käsityönä tehtävän O-renkaiden asennuksen nippoihin. Osat liittyvät toimeksiantajan valmistamien traktoreiden kokoonpanoon. O-renkaiden eli tiivisteiden asennus nippoihin tehdään käsityönä ilman voiteluaineita ja työvaihe koetaan hankalaksi ja hitaaksi. Asennuksia tehdään päivittäin lukemattomia määriä ja työvaihetta helpottamaan kehitetyt apuvälineet ovat jääneet käyttämättä. Suuresta toistomäärästä johtuen työvaihe vie paljon aikaa ja asennus kuormittaa työntekijän sormia, mikä heikentää merkittävästi työhyvinvointia.
Pilotoinnin tavoitteena oli saada O-renkaiden asennuksen robotisointi sellaiselle tasolle, että ihmistyöntekijän rooliksi jäisi nippojen ja o-renkaiden lisääminen soluun sekä asetusten muuttaminen, kun nippojen ja o-renkaiden koko muuttuu. Pilotissa päätettiin hyödyntää nopeatoimista SCARA-robottia, johon asennettiin O-renkaiden poimintaan soveltuva robottitarttuja. Pilotointi toteutettiin kahdelle O-rengas ja nippa koolle. Pilotointi päätettiin toteuttaa Proof of Concept -mallina.
O-rengastarttujan testaus aloitettiin asentamalla O-rengas nippaan ensin täysin manuaalisesti, jonka jälkeen o-rengastarttujaa testattiin yhteistyörobotissa hitailla nopeuksilla.
O-renkaat eroteltiin toisistaan täryn avulla. Täryerottimelle ohjelmoitiin muutama eri sekvenssi, kuten tyhjän täryerottimen täyttö, o-renkaiden keskittäminen ja kasojen hajottaminen. Sopivat arvot sekvensseille haettiin kokeilemalla.
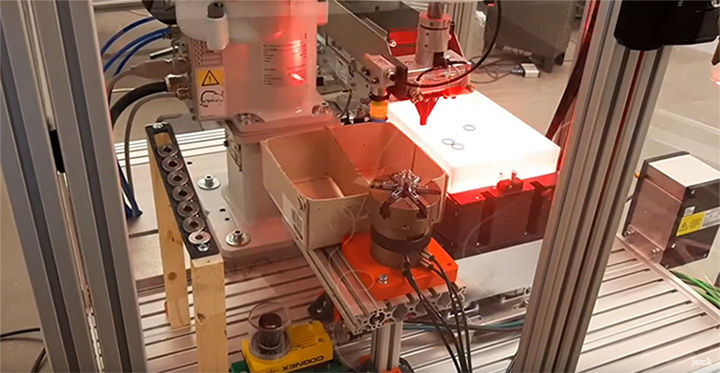
Paikoitus robotille poimintaa varten hoidettiin konenäöllä. Konenäköjärjestelmänä toimi ABB:n integrated vision. Mikäli kuvasta löytyi poimittavissa oleva o-rengas, robotti kävi sen poimimassa. Jos poimittavissa olevaa o-rengasta ei löytynyt, robotti ajoi jonkin tärysekvensseistä muun kuvasta saadun informaation perusteella. Tarttujana robotissa käytettiin lineaariliikkeistä paineilmatoimista sormitarttujaa, johon oli 3D-tulostettu tarkoitukseen soveltuvat sormet.
Nipan ja o-renkaan kokoonpanoa varten o-rengastarttuja asetettiin solun pohjalle siten, että robotti toi sekä o-renkaan, että nipan siihen kokoonpantavaksi. Nippojen erottelua varten tehtiin liuku, jonka toiseen päähän robotille opetettiin staattinen poimintapiste. Aina kun robotti kävi hakemassa yhden nipan, toinen nippa liukui edellisen tilalle poimittavaksi. Nippoihin tarttumista varten robotin tarttujaan lisättiin alipainetarttuja. Prosessia testattiin ensin hitailla nopeuksilla manuaaliajossa ja kun se oli todettu toimivaksi, testit suoritettiin uudestaan kovemmilla nopeuksilla automaattiajossa.
Soluun lisätiin vielä yksi konenäkökamera, jolla otettiin kuva nipasta o-renkaan asennuksen jälkeen. Näin varmistettiin, että asennus on tapahtunut oikein. Mikäli virheellisiä asennuksia tuli toistuvasti, ohjelma pysähtyi, kunnes syy epäonnistuneisiin asennuksiin oli selvitetty.
Myös nippojen täryerottelua ja konenäkö paikoitusta testattiin. Nippojen erottelu täryllä onnistui hyvin niille sopivaa kenno alustaa hyödyntäen. Myös konenäköpaikoitus toimi hyvin, kun valaistus tehtiin ns. dark field tekniikalla. Näitä ratkaisuja ei kuitenkaan otettu käyttöön varsinaiseen kokoonpanosovellukseen, koska se olisi vaatinut toisen tärymaljan lisäämistä soluun.
Pilotoinnin lopputulemana tehtiin Valtralle ehdotus järjestelmäkokoonpanoksi:
- Scara robotilla saavutetaan parhaat nopeudet.
- O-rengastarttuja solun pohjalle.
- Soluun olisi hyvä lisätä toinen täryerotin/-malja ja sen yhteyteen kamera, jotta myös nipat voidaan erotella täryn avulla ja sitten poimia. Eri nippakoot vaativat eri kokoiset kennot, joilla helpotetaan nippojen saantia oikeaan asentoon.
- Robottiin kiinnitetään työkalu, jossa on sormitartunta o-renkaiden poimimista varten ja alipainetarttuja nippojen poimimista varten. Alipainetarttujan yhteyteen laitetaan sensori, joka varmistaa onnistuneen poiminnan. Mikäli tällainen kokoonpano ei ole mahdollinen käytettävä kahta eri työkalua ja robotissa on oltava automaattinen työkalunvaihtaja.
- Nippojen konenäkötunnistusta varten valaistus on optimoitava olosuhteiden mukaisesti.
- Konenäkökamera on hyvä olla kokoonpanossa mukana laadunvalvontaa varten. Kuva nipasta on otettava joko altapäin tai sivulta.
- Valmiiden nippojen poistamiseen soluun tarvitaan joko aukko tai liuku, jonne pudotetut nipat poistuvat solusta painovoiman avulla tai soluun on asennettava kuljetin.
Pilotointi toteutettiin osana Jyväskylän ammattikorkeakoulun hallinnoimaa, Robots on Road -projektia. Projektin yhtenä tavoitteena on pilotoida modernin robotiikan ratkaisuja käytännön sovelluskohteisiin yrityksissä. Hanketta rahoittaa Euroopan unionin aluekehitysrahasto.
Kirjoittajat:
Tanja Minkkinen, viestintäsuunnittelija, Jyväskylän ammattikorkeakoulu
Janne Möksy, projekti-insinööri, Jyväskylän ammattikorkeakoulu